
S900-II
Fault 47 appears when Z moves up and the initialization signal is lost?
The problem may come from the “Arm Up” sensor (badly adjusted or defective), or from excessive slack on the Z arm (adjustment of prestress, section I in the customer file).
Updating the software from version V1.x to V2.x (or replacing the CPU board) generates a fault “outside zone” when moving off ZBD?
Change the P447 value to 128 for non-axial robots.
A CAN fault appears during start-up when replacing a pendant?
Adjust switch SW3-6 inside the pendant (this determines the communication speed).
I cannot acknowledge the loss of FAL fault (or lack of vacuum switch control)?
The XQP connector at the end of the arm is missing or the 24V1 is missing.
There are no longer any messages on the screen (presence of frames only)
Reset Flags using the PC2 robot software.
Some tips?
Reset Flags using the PC2 robot software. Make regular backups of your robots using the SEPRO editor. A robot without a PC option (DNC) can communicate with the PC Editor if the pendant cable on X4 is disconnected from the CPU board.
How to manage functional faults?
For all functional faults, check the power supply and control voltages, and particularly the 5V voltage on the back of the electronic boards rack (the voltage must be between 5.1V and 5.2V).
MPAII V2
In cycle, the robot moves to a hard stop on the X axis (plus or minus direction)?
The CPU board needs to be replaced (the board manages axis displacements) Please use the Helpdesk contact form to contact our spare parts department
Visual
My touch screen is offset?
Recalibrate the touch screen by moving the switch in the pendant to position 3 and then follow the instructions given on the screen.
What are the positions on the CPU switch that inhibit CAN Buses?
Position 9 : Pendant CAN active (CAN Robot and Speed driver CAN deactivated) Position A : Pendant CAN and speed driver CAN active (Robot CAN deactivated) Position B : Pendant CAN and Robot CAN active (Speed driver CAN deactivated)
What is the meaning of the CPU LEDs during a fault?
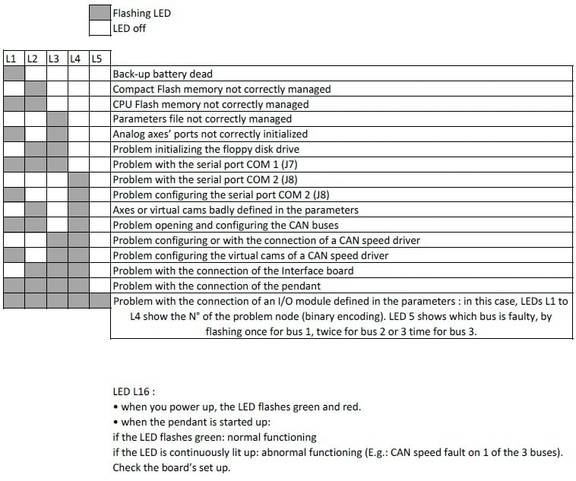
You can check the functioning using the troubleshooting LED’s : - Power up - Wait until the board is properly started up (about 2 minutes).
My touch screen is frozen?
The problem may come from a short circuited sensor (XQP connector at the end of the Z arm, rotation sensors, etc.).
Some tips?
Make regular backups of your robots using the SEPRO editor.
Visual 2
My touch screen does not respond?
Connect a wire mouse to the USB and restart the cabinet
Some tips?
Remember to regularly backup your robots on a USB stick. After swapping pendants between two robots for troubleshooting, each pendant must be returned to its original robot because the serial numbers are fixed on the pendant.